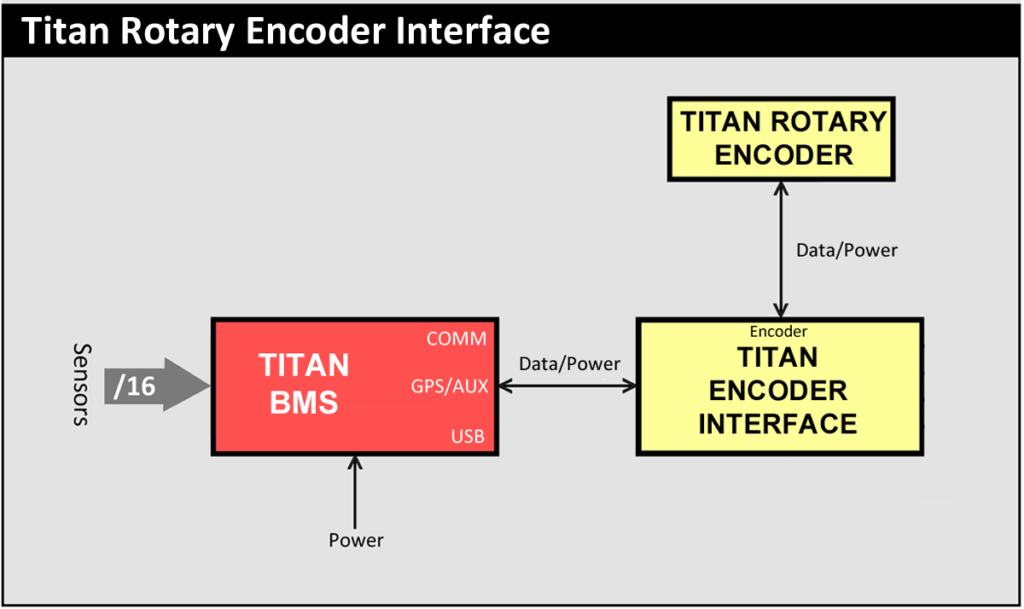
Titan Encoder Interface
Quad Encoder

KEY FEATURES:
- Appears as a CAN BUS device in the Titan Control Software (TCS) environment
- A full quadrature interface that counts up/down.
- Features three selectable RESET modes to establish indexing condition: Manual, Index, and Start of Test
- Rotary Encoder outputs 1024 PPR with a resolution of 360/600 of a degree (displayed in degrees)
- Suitable for a variety of intelligent control and displacement measurement operations, including rotational speed, angle, and acceleration
- Interfaces to Titan BMS and BSG Mini-Recorders via the Auxiliary Digital Input port
Specifications
| Interface Connection to Titan Mini-Recorder | via RJ12 connector (5V power and data) |
| Interface Connection to Rotary Encoder | via 5-pin Aviation connector |
| Encoder Maximum Mechanical Speed | 5000 R/min |
| Rotary Encoder | 1024 PPR with a resolution of 360/600 of a degree |
| Encoder Interface Dimensions | 3.15” x 2.125” x 0.91” |
Operational Considerations
- With 600 pulses per revolution at 500 RPM, the internal counters will change at the rate of approximately 5Khz.
- The system has been designed to provide one update for each analog scan, which means that if the acquisition rate was 1200 samples/second, updates would appear at 1/10 the rate. The update rate could be increased just by sampling faster.
- TCS has the ability to realign the signals in time to account for any processing delays (such as filters).